
Objectif : Programmer un robot devant se déplacer dans un espace restreint et contraint

Exemples de Chariots Autoguidés
Le robot MBOT
 |
 |
1 - Les différentes pièces du robot MBOT

2 - Disposition du mCore

3 - Branchement des câbles

Programmation MBot avec mblock 5
Le logiciel de programmation graphique mBlock est une version améliorée de Scratch, il peut être installer ou utiliser en ligne. mBlock 5 possède de nouveaux blocs liés à des actions matérielles, permettant de contrôler le robot mBot.

Dans l'onglet appareils il faut ajouter mBot
Attention à faire la différence entre le mode connecté et le mode automate!!
|
|
 |
Le mode connecté permet de piloter le mBot en direct avec un ordinateur via une connexion USB ou sans fils...mais une fois déconnecté, le mBot restera inerte. |
 |
 |
Le mode automate permet lui de programmer le mBot. C'est à dire d'implémenter le programme dans le mBot. Dans ce cas, après avoir téléversé le programme, le mBot exécutera son programme une fois alimenté. |

Téléverser le code dans le mbot en mode automate :
1. Connecter le MBot via le port USB, l'interrupteur doit être en position ON
2. Cliquer sur ![]()
3. Choisir le port de communication 
4. ![]() le programme, Attention, le téléversement peut parfois être long.
le programme, Attention, le téléversement peut parfois être long.
5. On débranche le câble USB et on vérifie que le programme s'exécute convenablement
Les capteurs
|
Capteur à ultrasons: Le capteur de distance par rapport à un obstacle est constitué par un émetteur et un récepteur à ultrasons. L’émetteur envoie une onde ultrason qui est renvoyée ou non par un obstacle rencontré sur son chemin. Le récepteur à ultrasons recevra ou non cette onde La vitesse du son dans l’air est constante et égale à 360 m par seconde. |
 |
|
|
Le module suiveur de ligne est un capteur de contraste. Il est constitué d’une LED émettrice et d’un phototransistor. Le capteur suiveur de ligne est constitué de 2 capteurs de contraste.
Etat du suiveur renvoie également une valeur en fonction de son état
|


Test des moteurs
Ecrire le programme ci-dessous, le téléverser et le tester
 |
 |
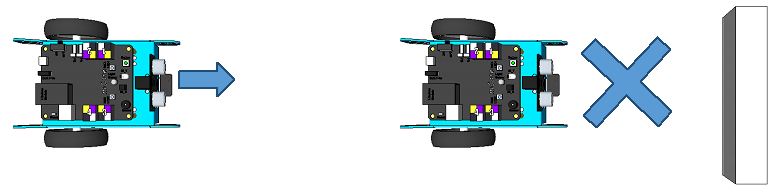
DEFI 1: s’arrêter devant un obstacle
Objectif: MBot avance, si il détecte un obstacle à moins de 10 cm, il s'arrête
Ecrire le programme permettant de réaliser l'objectif, le téléverser et le tester
 |
 |
DEFI 2 : Mbot tourne et s'arrête sur une ligne noire
Objectif: MBot tourne, si il détecte une ligne noire à gauche et à droite, il s'arrête
Ecrire le programme permettant de réaliser l'objectif, le téléverser et le tester
 |
 |
 |
 |
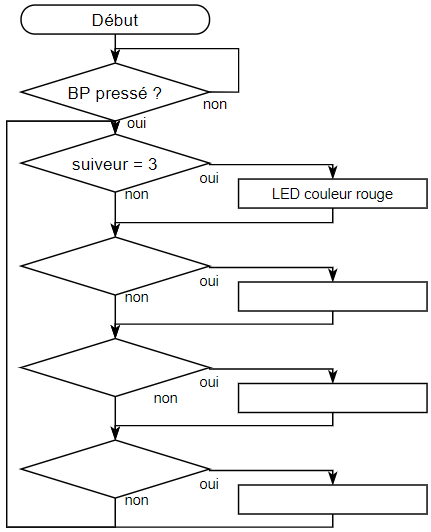
DEFI 3 : Codes lumières
Objectif: MBot change de couleur en fonction du code sur lequel il se trouve

Ecrire le programme permettant de réaliser l'objectif, le téléverser et le tester
|
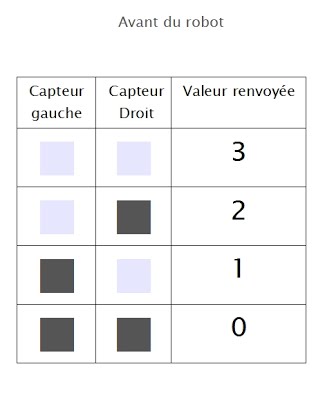
Pour cela nous allons utiliser le capteur situé à l'avant de notre mBot Il s’agit de l’instruction Le principe de fonctionnement est le suivant - Lorsque les deux capteurs détectent une couleur claire la valeur état suiveur est à 3 - Lorsque le capteur de droite détecte une couleur foncée et le capteur de gauche détecte une couleur claire la valeur état suiveur est à 2 - Lorsque le capteur de droite détecte une couleur claire et le capteur de gauche détecte une couleur foncée la valeur état suiveur est à 1 - Lorsque les deux capteurs détectent une couleur foncée la valeur état suiveur est à 0 |
 |
 |
 |
DEFI 4 : Mbot suit la ligne noire
Objectif: MBot avance sur le ligne noire, si il détecte du blanc il tourne du coté de la ligne noire
Ecrire le programme permettant de réaliser l'objectif, le téléverser et le tester
 |
 |
DEFI 5 : Mbot suit la ligne noire et s'arrête devant un obstacle
Objectif: MBot avance sur le ligne noire, si il détecte du blanc il tourne du coté de la ligne noire, si il détecte un obstacle, il s'arrête.
Ecrire le programme permettant de réaliser l'objectif, le téléverser et le tester
DEFI 6 : Mbot suit la ligne noire et s'arrête devant un obstacle + Affiche ses mouvements sur la matrice de LED
Objectif: MBot avance sur le ligne noire, si il détecte du blanc il tourne du coté de la ligne noire, si il détecte un obstacle, il s'arrête
MBot Affiche sur la matrice de LED (qui doit être connectée au port 4), une flèche correspondant à son déplacement ou le mot STOP
instructions à utiliser : ![]()

DEFI 7 : Sortir du labyrinthe
|
Principe du fonctionnement Mbot suit la ligne, Si il détecte un obstacle il tourne à gauche jusqu'à la prochaine ligne noire Après avoir tourner à gauche, s'il détecte toujours un obstacle, il doit tourner à droite jusqu'à la 2ème ligne noire Puis Mbot recommence |
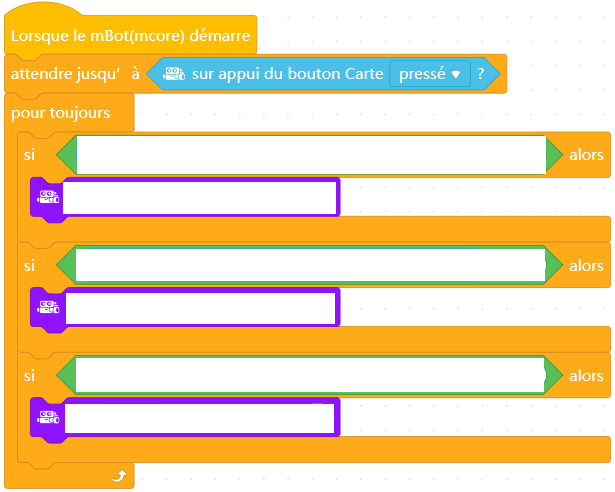
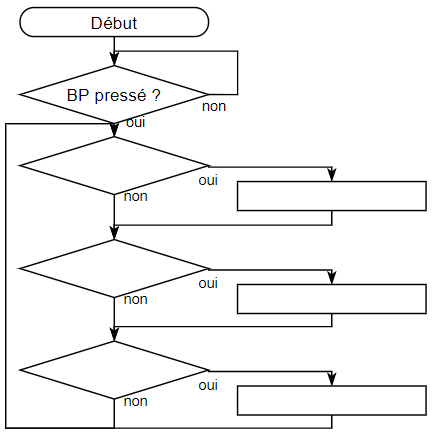
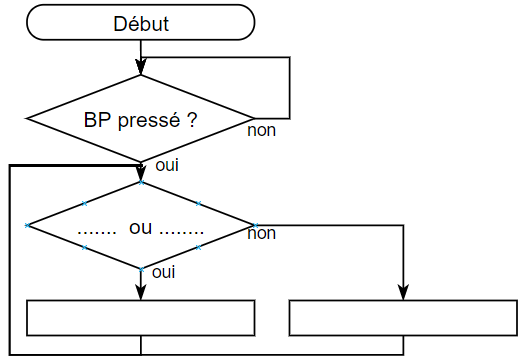
Organigramme
|

Ecrire le programme permettant de réaliser l'objectif, le téléverser et le tester
Défi 8 : Capteur à ultrason monté sur un servo moteur.
Installer le capteur à ultrason sur un servo moteur et ajouter l'extension Pack Servo sur Mblock
|
Un servomoteur est un moteur capable de maintenir une opposition, dont la position est vérifiée en continu et corrigée en fonction de la mesure. Le servomoteur intègre dans un même boitier, la mécanique (moteur et engrenage), et l’électronique, pour la commande et l'asservissement du moteur. La position est définie avec une limite de débattement d’angle de 180 degrés.
|
. |
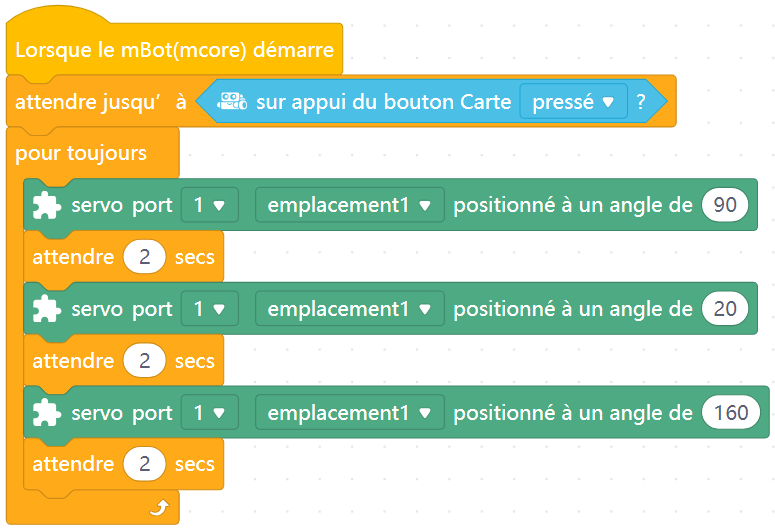
Ecrire le programme ci-dessous, le téléverser et le tester
|

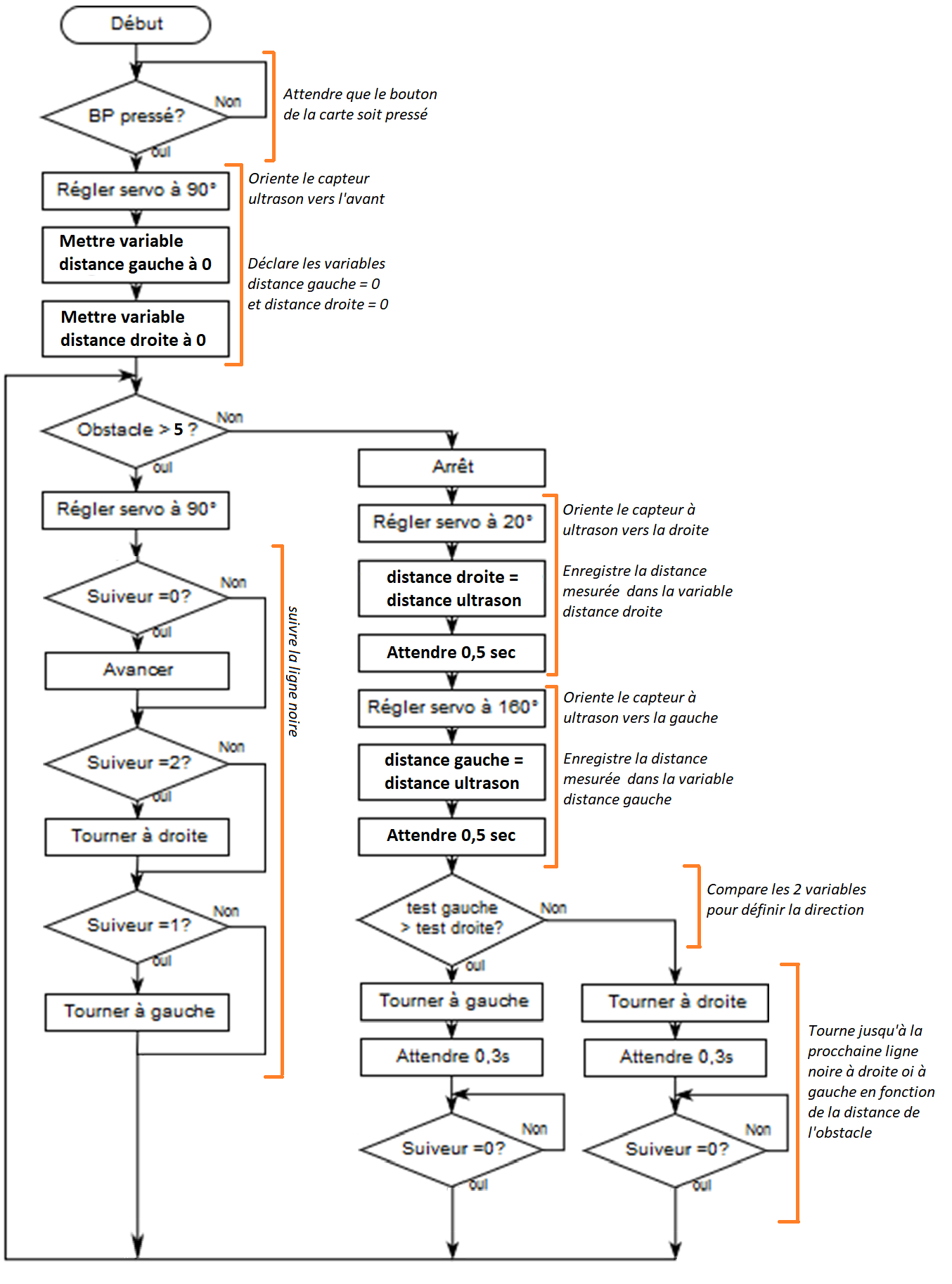
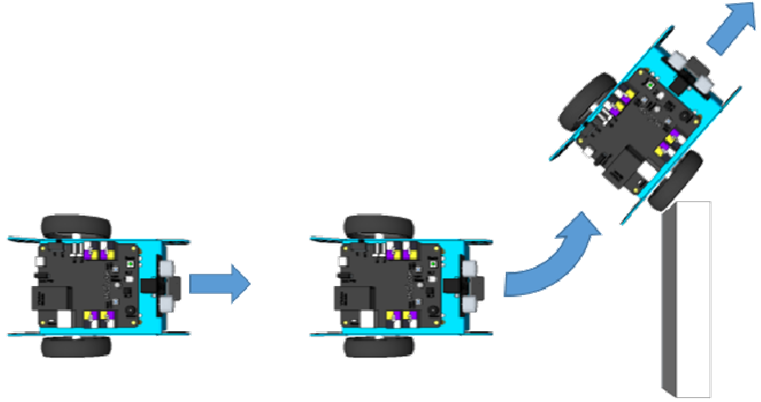
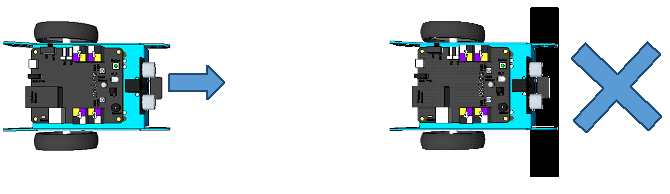
Défi 9 : Sortir du Labyrinthe avec choix de direction
|
Principe du fonctionnement Mbot suit la ligne, Si il détecte un obstacle: - le servo moteur oriente le capteur à ultrason à droite, mesure et enregistre la distance de l'obstacle - puis oriente le capteur à gauche, mesure et enregistre la distance de l'obstacle. Mbot compare les 2 mesures de distance et tourne du coté de l'obstacle le plus éloigné, jusqu'à la prochaine ligne noire Puis Mbot recommence |
Organigramme
|
Entrainement programmation
Objets connectés
Programmez des objets connectés, avec le module Quick-pi.
Débutants ou déjà initiés, manipulez des capteurs de distance, de luminosité, un accéléromètre, un buzzer, un servomoteur, etc. tout en apprenant les fondamentaux de la programmation, dans le langage de votre choix, parmi Scratch, Blockly ou Python.
 |
 |
 |
Autres
DEFI : Tourner si obstacle
Objectif: MBot avance, si il détecte un obstacle à moins de 10 cm, il tourne à gauche
Ecrire le programme permettant de réaliser l'objectif, le téléverser et le tester
|
|
DEFI : Mbot avance et s'arrête sur une ligne noire
Objectif: MBot avance, si il détecte une ligne noire à gauche ou à droite, il s'arrête
Ecrire le programme permettant de réaliser l'objectif, le téléverser et le tester
|
 |
Initiation au langage python
